
Hinweis : Nach dem Einschalten des Helis ca. 10 Sekunden warten, bis die Taumelscheibe einmal zuckt. In dieser Zeit darf der Heli auf keinen Fall bewegt werden. Wenn ich den Taumelscheibenzucker einmal verpasse, dann mache ich den Heli nochmal aus, warte 20 sec. und schalte erneut ein. Mit dem Taumelscheibenzucker zeigt das V-Stabi, dass es richtig initialisiert hat und nun betriebsbereit ist.
Über den Start mit Flybarless-Systemen habe ich viele schlimme Sachen gelesen. Was passiert wenn man vor dem Start steuert ? Merkt sich der Heli alle Kommandos und führt die nach dem Abheben aus ?
Alle Sorgen waren umsonst, es ist nämlich ganz
einfach !
Vor dem Start kann man mit stehendem Rotor ruhig alle Kanäle
überprüfen : Taumelscheibe, Heck und Pitch. Wenn man den Motor einschaltet dann
nicht mehr steuern : Die Taumelscheibe bewegt sich dann innerhalb 10 sec. auf
Neutralstellung. Den Heckrotor steuert man manuell auf 0 Pitch, so dass das Heck
nicht wegdreht, das mache ich beim Hochlaufen (ich habe "Entleeren" bei den
Heckparametern auf "Nein" gestellt, so stellt sich das Heck nicht automatisch
auf 0).
Bei Abheben nur darauf achten dass man kein Nick und Roll steuert, denn der Heli hebt auf jeden Fall gerade ab. Wenn sich der Heli in der Luft befindet kann man natürlich steuern. Das erste Mal mit Flybarless-System steuert man im Schwebeflug meistens zuviel, das muss man sich abgewöhnen.
Der Schwerpunkt
Bei einem paddellosen Heli muss der Schwerpunkt
besonders sorgfältig eingestellt werden. Wenn der Schwerpunkt nicht stimmt, dann
muss das V-Stabi ständig nachregeln. Wenn man nun eine Rolle fliegt dann kann
die Regelung nicht so schnell der Drehung folgen und der Heli eiert in der
Rolle.
Wie ermittelt man den Schwerpunkt ? An der Paddelstange halten ? Geht
nicht !
Man hält den Heli an den Rotorblättern und hält den Heli so, dass die
Hauptrotorwelle waagerecht steht. Der Rumpf darf sich nun nicht von alleine
drehen, sondern er muss in jeder Stellung stehenbleiben.
Beim Logo kann man
den Schwerpunkt gut durch Verschieben des Antriebsakkus einstellen.
Der Trimmflug
Hier trimmt man den Heli so, dass er ohne Steuern
auf der Stelle schwebt.
Das geht so : Den Heli schweben lassen im Classic
Mode. In der V-Stabi Software Registerkarte "Regelparameter" die Trimmwerte so
verstellen, dass der Heli auf der Stelle schwebt ohne Steuerkommandos. Dabei die
einfachen Pfeile für kleine Korrekturen und die Doppelpfeile für größere
Korrekturen. Ein Doppelpfeil entspricht fünf Einfachpfeilen.
Da ich Laptop
und Bluetoothmodul habe geht das ganz einfach. Wenn man das nicht hat kann man
auch im Sender trimmen und dann die Trimmung später in die V-Stabi-Software
übertragen. Dazu im Live-Menü schauen wieviel man im Sender getrimmt hat, in
V-Stabi trimmen und die Trimmung des Senders wieder zurückstellen.
Die
Trimmung kann pro Bank gespeichert werden, so dass man bei verschiedenen
Flugphasen verschiedene Trimmungen haben kann. Nutzt man die Bankumschaltung, so
überträgt man die ermittelten Trimmwerte aus den Feldern "Neutralstellung" der 3
Servos auf der Registerkarte "Taumelscheibe" in die anderen Bänke. Die
Bankumschaltung erkläre ich im nächsten Kapitel.
Ab Version 4.0 von V-Stabi, die es ja bald gibt,
erfolgt die Trimmung in einem Trimmflug automatisch. Wie das geht ? Lasst
Euch überraschen.
Die Bankumschaltung finde ich eine ganz tolle
Sache, die es in dieser Form nur bei V-Stabi gibt : Man kann bis zu 4
verschiedene Setups im V-Stabi hinterlegen und vor dem Start und sogar im Flug
umschalten. Ich benutze dazu einen langen Drei-Stufen-Schalter rechts oben
(Schalter C bei der FF-9). Er ist auf Kanal 5 programmiert, der mit dem
AUX-Eingang des V-Stabi verbunden ist. Da er nur 3 Stufen hat kann ich auch nur
3 Setups im V-Stabi auswählen, aber das genügt mir.
Im Live-Menü der
V-Stabi-Software sieht man den AUX-Eingang und die gewählte Bank im V-Stabi. Ich
habe Servomitte und -endpunkte von Kanal 5 so gelegt, dass ich Bank 0, 1 und 2
auswählen kann und die Umschaltpunkte weit weg von den Punkten liegen, bei denen
V-Stabi die Bänke schaltet (so dass nicht mitten im Flug plötzlich eine andere
Bank aktiv ist).
Ich fliege normal immer mit Bank 0. Die aktive Bank wird in
der V-Stabi-Software auf jeder Registerkarte links unten angezeigt. Es wird
immer die aktive Bank angezeigt und bearbeitet.
Zur Sicherheit sollte man die Einstellungen der Bank 0, die man zum
Fliegen benutzt, auf alle anderen Bänke kopieren : Auf der Registerkarte
"Verwaltung" "Kopiere aktive Bank" "alle" wählen und
[Start]anklicken.
Wenn man nun neue Setups probiert oder für den HEcktrimm auf Normal-Mode stellt, kann man dies auf Bank 1 oder 2 vornehmen. Man kann sogar, wenn alles schief geht, im Flug auf Bank 0 zurückschalten.
Eine tolle Sache, oder ?
Einstellungen des FF-9 Senders
Bei meiner FF-9 habe ich die Schalter genauso wie beim Mini Titan belegt :
Schalter E (kleiner Schalter links vorne) : Unten
Moter Aus, Mitte Flugphase 1, Oben Flugphase 2
Schalter F (großer Schalter
links vorne) : Motor Not-Aus (Autorotation)
Schalter C (großer Schalter oben
rechts) : V-Stabi-Bankumschaltung, Vorne Bank 0, Mitte Bank 1, Hinten Bank
2.
Beim Einschalten des Senders müssen alle Schalter vorne und unten stehen, das sieht man mit einem Blick.
Den Sender habe ich wie folgt programmiert
:
Basic Menü Heli
1/2
Modellwahl : 01 Logo 500 (Mein
Mini Titan ist auf Platz 2 gerutscht)
D/R, EXPO : CH1 (Roll) EXP -20%,
CH2 (Nick) EXP -20%, CH4 (Heck) EXP -20%, D/R immer auf
100%
ENDPUNKT : 1 Rol 105/104, 2 Nik 103/103, 3 Gas 100/100, 4 Hek 103/104, 5
Krs 91/27, 6 Pit 107/77 (im V-Stabi Live-Menü angepasst)
SERV-MIT : 1 Rol
-21, 2 Nik +20, 3 Gas 0, 4 Hek -22, 5 Krs -120, 6 Pit +34 (im V-Stabi
Live-Menü angepasst)
SERV-UMP : 2 Nik, 3 Gas und 6 Pit auf
Reverse
Basic Menü Heli
2/2
GEBERWAHL : CH5 -> Sw-C
(V-Stabi Bankumschaltung)
PARAMETER : TYPE HELI (SWH1), MODUL PPM, ATL
ON
GAS-KURVE NORM : 0%, 0%, 0%, 0%, 0%
PITCH-KURVE NORM : 0%, 25%, 50%,
70%, 90%
HECKROTOR-MIX : NORM MIX -> INH
STOPPUHR : <1> TIME
7:00, MODE UP, SW E, POSI Cntr&DN, <2> TIME 8:00, MODE UP, SW E, POSI
Cntr&DN (Timer 2 zur Sicherheit)
Advance Menü Heli 1/2
GAS-KURVE : NORM 0%, 0%, 0%, 0%, 0%, IDLE1 MIX OFF, 70%, 70%, 70%,
70%, 70%, IDLE2 MIX OFF, 75%, 75%, 75%, 75%, 75%, IDLE3 MIX OFF, 0%, 0%, 0%, 0%,
0%
PITCH-KURVE : NORM 0%, 25%, 50%, 70%, 90%, IDLE1 0%, 25%, 50%,
70%, 90%, IDLE2 0%, 25%, 50%, 70%, 90%, IDLE3 0%, 25%, 50%, 70%, 90%
HECK-MIX
: NORMAL MIX INH, IDLE1/2 MIX INH, IDLE3 MIX INH (wichtig)
KREISEL : MODE
STD, MIX INH
SCHWE-GAS : MIX INH, RATE 0%
SCHWE-PITCH : MIX INH, RATE
0%
PITCH-WEG : Norm HI-PIT 100%, ADJ MAN, LO-PIT 100%, ADJ MAN, IDL1
HI-PIT 100%, ADJ MAN, LO-PIT 100%, ADJ MAN, IDL2 HI-PIT 100%, ADJ MAN, LO-PIT
100%, ADJ MAN, IDL3 HI-PIT 100%, ADJ MAN, LO-PIT 100%, ADJ MAN, HOLD
HI-PIT 100%, ADJ MAN, LO-PIT 100%, ADJ MAN
AUTOROTATION : MIX ON/OFF (je nach
Schalterstellung), POSI 0%, HECKROTOR MIX INH
OFFSET : MIX
INH
Advance Menü Heli
2/2
SCHALTER : IDL1/2 E, IDL3 A,
T-HOLD F
Die anderen Werte stehen auf Vorgabewert bzw. auf 0%
Alle Angaben ohne Gewähr !
Damit ich schnell und einfach mehrere V-Stabi-Einstellungen vergleichen kann habe ich ein kleines Programm geschrieben : V-Stabi-Compare.
Man kann mehrere Parametersätze nebeneinander in einer Tabelle darstellen und sieht so sofort die Unterschiede.
Download : VStabiCompare.zip
Installation : Dateien in ein Verzeichnis auf
einer (lokalen) Festplatte entpacken und VStabiCompare.exe
starten.
Wenn das .NET Framework 2.0 SP1 fehlt dann dotnetfx.exe starten.
Das sollte aber jeder moderne Rechner haben.
Verlangt das Framework nach dem
Windows Installer, so kann man diesen hier laden und installieren : WindowsInstaller31.exe
Mit "Dateien öffnen" kann man mehrere XML-Dateien
in einem Verzeichnis selektieren und nebeneinander anzeigen.
Mit
"Dateien hinzufügen" werden eine oder mehrere Dateien zur Liste
hinzugefügt.
Mit "Leeren" wird die Liste geleert.
Mit "Ausblenden" werden
gleiche Parameter ausgeblendet, so dass man sofort die Unterschiede
sieht.
Man kann auch Dateien aus einem Verzeichnis mit der Maus auf das
V-Stabi-Compare-Programm ziehen (Drag and Drop).
Mit "Pitchrechner" erscheint
ein neuer Dialog, hier kann man einfach den Pitchwert des Helis bis aufs
Zehntel Grad ausrechnen. Erklärung im nächsten Kapitel.
Versionshistorie :
17.12.2008 : 1. Version von
V-Stabi-Compare, Versionsnummer 0.8
04.02.2009 : Version 0.9 : Drag and Drop,
Hinzufügen, Leeren, Ausblenden
06.02.2009 : Der Pitchrechner ist
hinzugekommen
11.02.2009 : Der Pitchrechner kann nun auch Mehrblattköpfe und
zyklische Ausschläge berechnen
02.10.2009 : Aus dem Pitchrechner ist ein
eigenes Programm geworden. Es lassen sich nun auch Dateien von V-Stabi 4.0
laden.
Anmerkung zu V-Stabi 4.0 : Ich habe zwar die neuen
Parameter von 4.0 hinzugefügt, diese Parameter haben aber keinen Namen. Mit
Erscheinen der Version 4.0 von V-Stabi wurde die Einstellung sehr stark
vereinfacht, der Vergleich verschiedener Parameter ist nun nicht mehr so
wichtig.
Mit dem Pitchrechner kann man einfach und schnell die minimalen und maximalen Pitchwerte eines Helis messen bzw. errechnen lassen. Es gibt auch die Möglichkeit zyklische Ausschläge oder Pitchwerte von Mehrblattrotoren (also mehr als 2) zu messen.
Download : Pitchrechner.zip
Installation : Dateien in ein Verzeichnis auf
einer (lokalen) Festplatte entpacken und Pitchrechner.exe
starten.
Wenn das .NET Framework 2.0 SP1 fehlt dann dotnetfx.exe starten.
Das sollte aber jeder moderne Rechner haben.
Verlangt das Framework nach dem
Windows Installer, so kann man diesen hier laden und installieren : WindowsInstaller31.exe
Es gibt auch eine Version für PDA's, es läuft unter Windows Mobile 2003 und 2006.
Download : PitchrechnerPDA.zip
Installation : Dateien in ein Verzeichnis auf
einer (lokalen) Festplatte entpacken und NETCFSetupv35.msi auf dem PC
starten. Es wird das Compact Framework auf dem PDA installiert (der muss
natürlich am PC angeschlossen sein).
Dann Pitchrechner.exe auf den PDA
kopieren und dort starten
Beim Start des Pitchrechners erscheint ein
Dialog, man kann nun einfach den Pitchwert des Helis bis aufs Zehntel
Grad ausrechnen.
Das geht so : Einfach Rotorblätter nach hinten klappen,
Vollpitch geben, Abstand der Rotorblätter messen, in Pitchrechner eingeben, dann
noch den Abstand von der Blattspitze bis zum Mittelpunkt der Rotorblattschraube
messen und eingeben, auf [Pitch errechnen] klicken ...
... und schon
wird der exakte Pitchwert bis auf das Zehntel Grad genau
angezeigt.
Genausogut kann man den gewünschten Pitchwert eingeben und durch
Klick auf [Abstand errechnen] den notwendigen Abstand errechnen
lassen.
Damit der Rotorkopf nicht belastet
wird und die Messung nicht durch die Schwerkraft beeinträchtigt wird, kann man
den Heli auf die Seite legen. Wenn die Rotorblätter dann von alleine
runterklappen sind sie zu lose angeschraubt.
Beim Mehrblattkopf müssen die
Rotorblätter genau 90 Grad nach vorne oder hinten geklappt werden. Dann wird der
Abstand der Aussenkante bei 0 Pitch und bei Vollpitch gemessen und in den
Pitchrechner eingetragen. Da hier große Kräfte auf die Taumelscheibenservos
wirken keine Gewähr !
Versionshistorie :
06.02.2009 : 1. Version vom
Pitchrechner
11.02.2009 : Der Pitchrechner kann nun auch Mehrblattköpfe und
zyklische Ausschläge berechnen
02.10.2009 : Aus dem Pitchrechner ist ein
eigenes Programm geworden. Es gibt nun auch eine Version für den PDA mit Windows
Mobile.
V-Stabi-Programmierung Teil 2
Mein Logo flog mit dem Preset, das beim V-Stabi dabei war, sofort. Dennoch möchte man als Heli-Pilot seinen Heli ständig optimieren und verbessern. Dafür bietet das V-Stabi gute Voraussetzungen.
In diesem Kapitel möchte ich die Änderungen und Erfahrungen, die ich mit meinem V-Stabi-Setup gemacht habe, festhalten.
Der Erstflug am 20.12.2008 fand mit dem Original-Setup von V-Stabi statt. Lediglich die Werte für Heckrotorlimit links und rechts hatte ich von 55 auf 52 reduziert.
Da das Heck ganz langsam weggedriftet ist habe ich
aufgrund von Empfehlung von Rainer aus dem V-Stabi-Forum die Heckwerte wie folgt
geändert :
Heck Gesamtverstärkung : 75 -> 80
Heck Intanteil : 25 ->
50
Heck Diffanteil : 0 -> 20
Heck Propanteil : 85 -> 90
Ausserdem
hab ich alle Gyro-Totzonen von 5 auf 0 gestellt, die RC-Totzonen von 8 auf
4.
Mit diesen Einstellungen steht das Heck wie eine Eins, auch nach 5 min.
Schweben dreht es kein Grad weg.
Mein Classic-Setup vom Januar 2009 : Logo500_Bernd_Classic_19012009.xml
Neben dem Classic Mode gibt es in V-Stabi noch den erweiterten Mode und den Ultra Mode. Der erweiterte Mode ist eigentlich nicht mehr notwendig. Der Ultra Mode verspricht extrem schnelle Reaktionszeiten der Regelung und kombiniert hohe Wendigkeit des Helis mit extremer Stabilität im schnellen Flug und beim Schweben bei Wind. Die genauen Unterschiede werden im V-Stabi-Wiki erklärt.
Am 06.02.2009, Erstflug nach dem Absturz, habe
ich die Gelegenheit genutzt, und habe den Ultra Mode getestet. Dazu habe ich
nicht einfach auf Ultra umgeschaltet, sondern ich habe ein fertiges Setup von
M@ui aus Ludwigshafen ausprobiert, das er mir freundlicherweise
zugeschickt hatt.
Obwohl ich echt Bammel hatte das auszuprobieren bin ich
sofort super mit dem Setup zurechtgekommen : Der Heli ist super ruhig in der
Luft, sowohl im Schwebeflug als auch im schnellen Vorwärtsflug. Bei Flips und
Rollen ist der Heli nun superwendig, das macht echt Spass !
Gegenüber dem Setup von M@aui habe ich die Empfindlichkeit Hauptrotor von 380 auf 300 reduziert, da ich bei Schwebeflug und Nick ein Nachwippen hatte.
Hinweise : Beim Tausch von V-Stabi-Parametern und
beim Testen von fremden Setups unbedingt vor dem Start die Steuerrichtung von
Roll, Nick und Heck prüfen. Ausserdem die Wirkrichtung der Sensoren
prüfen.
Am besten Setups übernehmen, die mit gleichen Rotorblättern und
gleicher Drehzahl geflogen wurden.
Beim Übernehmen von fremden Setups die
Servo-Nullstellungen und das Heckrotorlimit überprüfen bzw, anpassen.
Mein Ultra-Setup vom 08.02.2009 : Logo500_Bernd_Ultra_08022009.xml (Mit rechter Maustaste anklicken und dann "Speichern unter")
Beim Flug vorgestern ist der
Motor ausgegangen, wohl eine Abschaltung des Reglers. Ich habe deshalb das
Max-Pitch wieder auf 12 zurückgestellt, indem ich Pitch gemeinsam auf 85
gestellt habe.
Bei Pirouetten in schnellem Vorwärtsflug hat sich das Heck
aufgeschaukelt. Ich habe deshalb das Heck auf die alten Werte zurückgestellt und
P und D um 5 vermindert. Das Heck geht immer noch superknackig und bei
Pirouetten wackelt nun nichts mehr.
Hier mein Ultra-Setup vom 14.02.2009 : Logo500_Bernd_Ultra_14022009.xml
Pitchwerte und Drehzahl
Hier meine Pitchwerte und Drehzahl :
Im Sender habe ich eine Pitchkurve 0, 25, 50, 70, 90% programmiert, da positives und negatives Pitch, warum auch immer, nicht symmetrisch waren.
Beim Classic-Setup mit Pitch gemeinsam von 85 hatte ich Pitchwerte von -9,4 bis +12,0 Grad.
Beim Ultra-Setup mit Pitch gemeinsam von 100 habe ich Pitchwerte von -10,0 bis +13,9 Grad. Zyklisch habe ich 11,5 Grad.
Damit komme ich gut zurecht und ich werde es so
lassen. Mit dem 14-er Ritzel hat der Motor
genug Leistung, um auch mit fast 14 Grad Pitch kaum einzubrechen. Ich hatte
schon gesagt : In 2 Sekunden an der Sichtgrenze !
Das negative Pitch lasse
ich etwas kleiner, da der Heli auf dem Rücken mehr Dampf hat (da der Rumpf
nicht im Weg ist).
Mit dem 13-er Ritzel hatte ich bei 75% Regleröffnung eine Drehzahl von 2180. Da die Drehzahl bei Vollpitch eingebrochen ist habe ich auf das 14-er Ritzel gewechselt.
Mit dem 14-er Ritzel habe ich bei 55% Regleröffung eine Drehzahl von 2150. Damit fühle ich micht wohl und werde es so lassen. Das 14-er Ritzel ist auch eine Empfehlung von Hacker direkt.
Habe festgestellt das 14 Grad Pitch für mich doch zuviel sind und habe auf 12 Grad zurückgestellt.
Meine Ladetechnik
Die neuen Akkus vom Typ Zippy 6S 5000 mAh haben an meinem Ultramat 16 vier Stunden zum Laden gebraucht (2 Akkus nacheinander). Also musste eine neue Ladetechnik her :
- Hyperion EOS-610i DUO2 (von www.rcfunshop.de)
- Manson SPS 9400
Netzteil 40A (von www.thiecom.de)
Jetzt dauert das Laden von 2 Akkus weniger als eine Stunde und ich habe noch
genügend Reserve für größere Akkus oder höhere Ladeströme.
Mit dem Autoakku
kann man nun nicht mehr laden, denn nach mehreren Entladungen ist der
kaputt.
Als Ladequelle habe ich einen Sonnenschein Blei-Gel Akku mit 12 V 65
Ah im Kofferraum.
Zusätzlich habe ich einen Heizkoffer, der die Akkus vor
dem Einsatz auf 30 Grad aufheizt.
Wen es interessiert : Beim Laden beider Akkus mit je 5A fließen im Manson 18A bei 15 V und 23A bei 12V, das sind 276 W! Da 250 Watt in die Akkus gehen hat das Hyperion einen Wirkungsgrad von 90%.
Eine gute Einführung in die Akku-Grundlagen : http://www.rc-heli.de/board/showthread.php?t=74034
Mein Ladetisch :

Von links nach rechts : Cellpro 4S, Ultramat 16, Manson SPS 9400, Ladekoffer mit Hyperion EOS-610i DUO2, Heizkoffer mit 36W-Heizfolie, Thermometer, Thermostat für konstante 30 Grad.
Eine dritte Hand beim Löten
Beim Löten von Steckern und Kabeln fehlt einem oft eine dritte Hand, um Kabel
und Stecker in der richtigen Position zu halten. So eine dritte Hand gibt es
zwar zu kaufen, aber noch einfacher und besser baut man das selber.
Material
: 2 Holzwäscheklammern (kein Plastik!), 4 kleine Schrauben oder Nägel, ein
Holzblock, optional 4 Gummifüße oder 2 Gummistreifen.
Die Holzklammern oben
und an der Seite des Holzblocks festschrauben oder -nageln, Gummifüße drunter,
fertig !

Vorteil gegenüber der käuflichen Variante : Wenn man Akkustecker lötet und
das andere Kabel an die dritte Hand kommt gibt es keinen Kurzschluß !
Beim
Löten von Goldies mit Federn diese nicht in eine Buchse stecken, die Federn
dürfen nicht unter Spannung stehen.
Noch ein Tipp : Wenn Du mit dem Löten nicht sicher bist dann lasse die Sachen von jemand anders löten. Die Gefahr eines Absturzes durch eine kalte Lötstelle ist sonst groß !
Tipps für V-Stabi im T-Rex und anderen Helis
Für T-Rex 500 und 600 (E und N) gibt es schon fertige Setups im
V-Stabi.
Für den T-Rex 450 gibt es ein fertiges Setup im V-Stabi-Forum (bei
Setups).
Diese gehen von folgender Hardware aus :
T-Rex 450 und 500 :
Sensor mit Kabel nach hinten und Schrift nach oben installiert
T-Rex 600
(alle Modelle) : Sensor mit Kabel nach vorne und Schrift nach oben installiert,
passt so besser.
Wenn man den Sensor anders herum installiert (wenn's sein
muss) dann im V-Stabi-Setup Wirkrichtung Sensor Nick und Sensor Roll
invertieren.
T-Rex 500 : Rotorkopf mit nachlaufender Anlenkung
(Align-Schriftzug nach oben), bei Positivpitch geht die Taumelscheibe nach
unten.
T-Rex 450 und 600 (alle Modelle) : Rotorkopf mit vorlaufender
Anlenkung (wie beim Logo), bei Positivpitch geht die Taumelscheibe nach
oben.
Wenn die Taumelscheibe anders geht als hier beschrieben hat man mit
großer Wahrscheinlichkeit den Rotorkopf falsch zusammengesetzt.
Auf der
Mikado-Website ist der T-Rex-500-Rotorkopf falsch dargestellt (Align-Schriftzug
ist unten).
Wenn man den Rotorkopf anders herum nutzen möchte (vorlaufend
statt nachlaufend und umgekehrt), dann das Vorzeichen im Feld "Pitch gemeinsam"
ändern. Bei Delta-3 = 0 sollte das rein theoretisch keinen Unterschied machen
(ohne Gewähr).
Wenn man beim T-Rex 600 die Verlängerungen der Bastlerzentrale benutzt dann sind die Original-Rotorblatthalter nachlaufend angelenkt. In diesem Fall wie schon gesagt das Vorzeichen im Feld "Pitch gemeinsam" ändern. Auf keinen Fall die Felder "Servo invers" anfassen, bevor man den Wert in "Pitch gemeinsam" geändert hat.
Mein Tipp : Wenn man nicht zu 100% weiss was man tut dann unbedingt die Empfehlungen der Hersteller befolgen und den Rotorkopf so zusammenbauen wie das ursprünglich gedacht war.
Die drei Taumelscheibenservos sind in der Grafik oben in der Mitte auf der Registerkarte "Taumelscheibe" der V-Stabi-Software angezeigt (Expertenmodus). Diese Ansicht zeigt die Taumelscheibe von oben, oben ist vorne vom Heli. Genauso wie die Servos dargestellt werden müssen sie an die Kanäle 1 - 3 (Channel 1 -3 ) angeschlossen werden.
Vor dem Erstflug in der Registerkarte "Regelparameter" die "Hauptrotor
Wendigkeit" auf 60 stellen, denn der Heli wird sehr
agil sein. Den Wert
kann man später noch erhöhen (70-80). Nicht vergessen Expo im Sender auf allen 3
Kanälen auf 20 bis 40% (-20 bis -40% bei Futaba).
Der Drehmomentausgleich (DMA)
Wenn man Pitch gibt erhöht sich das Drehmoment und das Heck will sich
wegdrehen. Ein Kreisel merkt das und kann gegensteuern. Das V-Stabi weiss das
aber schon vorher. So kann es gegensteuern bevor sich das Heck wegdreht. Das
ergibt ein superstabiles knackiges Heck.
Wenn der DMA falsch eingestellt ist
dreht das Heck weg bei Vollpitch.
V-Stabi muss für den DMA wissen, wann das
Pitch 0 Grad ist (geringstes Drehmoment). Wenn man Pitch 0 nicht bei
Knüppelmittelstellung (ca. 0 im Live-Menü) hat dann einfach 0 Pitch einstellen
und auf "Nullpitch setzen" in der Registerkarte "Heck" klicken.
So testet man
den DMA : Pitch auf 0 stellen, Heckrotorblätter gerade stellen. Bei Pitch oder
Roll oder Nick (egal welche Richtung) erhöht sich das Drehmoment und das Heck
soll etwas stärker gegen das Drehmoment arbeiten.
Die Hinterkante der
Heckrotorblätter bewegen sich nach aussen vom Heckrohr weg. Beim Logo geht die
Hülse nach innen, ich weiss nicht wie das beim T-Rex ist.
Flugfortschritte mit dem Logo 500
20.12.2008 : Erstflug meines Logo 500, fast genau
ein Jahr nach dem Erstflug meines Mini Titans.
Der Erstflug fand wegen des
Wetters Indoor in der Halle von Jan (M3LON) in Beselich in der Nähe von Limburg
statt.
Ich habe den Logo 500 gaaanz vorsichtig geflogen. Beim Hochdrehen der
Blätter sind alle in Deckung gegangen.
Jan hat ein Video gemacht (nur
mit Quicktime Player mit Ton): Logo500_Bernd_Hallenfliegen.mp4
17.01.2009 : 1. Rückenflug in Augenhöhe
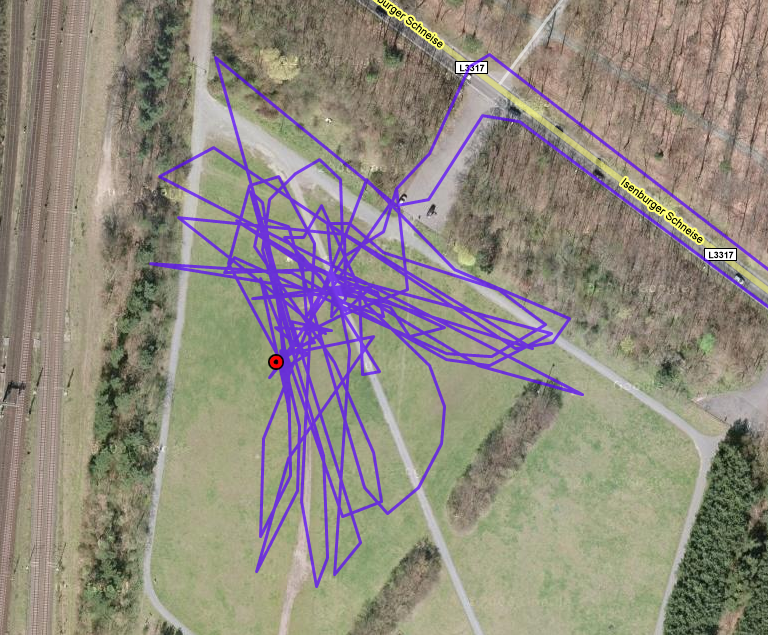
21.01.2009 : 1. Flug mit GPS-Logger, maximale Höhe 100 m, maximale Geschwindigkeit 86 km/h. So bin ich geflogen : GPS_Flug_21012009.png
24.01.2009 : 4 Flips am Stück (rückwärts). Seiten-Rückenschweben. Hab mal ne Cam unter den Heli gehängt und die Flugwiese von Kelsterbach von oben gefilmt : LogoCam_Bernd_24012009.wmv
28.01.2009 : 4 Frontflips am Stück, Rückenfliegen in Bodennähe mit Hin- und Herfliegen, Pirouette auf dem Rücken in Augenhöhe.
31.01.2009 : Erster Absturz mit dem Logo
:-(
Eine Rolle zu weit weg geflogen, dann versteuert, dazu schlechte Sicht
wegen Sonne und Bewölkung, und schon habe ich die Fluglage nicht mehr erkannt.
Das Ergebnis : Logo500Absturz1.jpg und
Logo500Absturz2.jpg
Ich
hatte echt Glück, bis auf Rotorwelle, Rotorblätter, Heckrohr und ein
paar Hebelchen ist nichts kaputtgegangen. Nächstes WE fliegt er
wieder.
06.02.2009 : Erstflug nach dem Absturz, mit 14-er Ritzel und neuem V-Stabi-Setup von M@ui. Der Heli geht jetzt noch mehr ab ! 3 Flips pro Sekunde ! Bei Vollpitch in 2 Sekunden an der Sichtgrenze !
12.02.2009 : Motor geht aus beim Fliegen. Meine erste hohe Autorotationslandung mit dem Logo. Da hab ich wohl was überlastet, ich werde das mal untersuchen.
14.02.2009 : Hab das Max-Pitch wieder zurückgestellt und den Unilog vom Thomas mal mitfliegen lassen. Hab mal Strom und Regler-Temperatur gemessen : Regler max. 80 A, Temp. max. 26 Grad, also alles im grünen Bereich. Der 70A-Regler ist laut Hacker auf 110 A ausgelegt und bis 190 A getestet, ohne Abschaltung.
01.03.2009 : Erster längerer Rückenflug, aber noch in sicherer Höhe. Rückenschweben geht nun auch längere Zeit recht niedrig, werde wohl bald das erste Mal Rasen mähen.
03.03.2009 : Frank hat mich heute beim Fliegen
an der Isenburger Schneise in Frankfurt gefilmt.
Film bei http://www.rcmovie.de/video/d8473e169b46ab0a5071/Bernds-V-Stabi-Hubi
Film zum Download (24 MB) : www.partyfotos.de/heli/videos/Bernds_Hubi_03032009.wmv
Wenn ich gewusst hätte dass ich gefilmt werde hätte ich
weniger Heckschweben geübt ;-)
Danke an Frank !
{kind=link}
{kind=link}
{kind=link}
{kind=link}